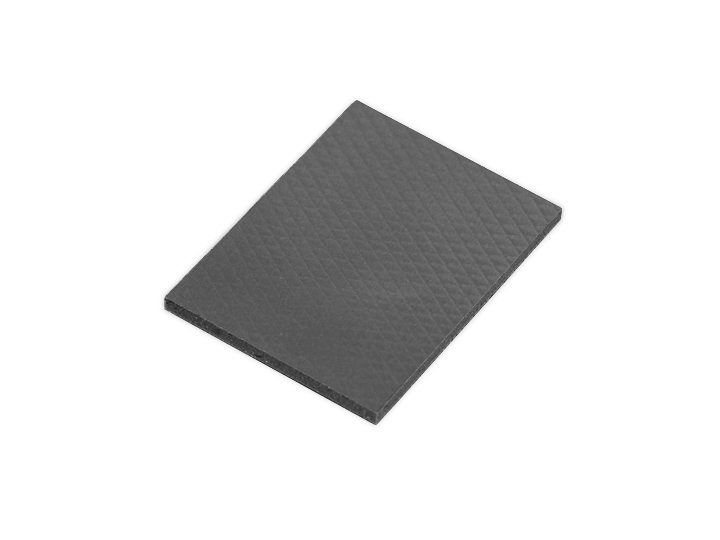
导热垫片
高柔韧性、高压缩性的热界面材料,广泛用于填补散热模组与芯片间的空气间隙,提供稳定高效的热传导路径,适用于各类电子设备的散热管理。








在智能机器人关节电机中,MOS 管、MCU 和驱动板等器件通常集中布置在有限空间内,运行时容易形成局部发热。为了把热量更有效地传导到金属外壳,行业内通常会在发热器件与壳体之间加入导热界面材料。以宇树 GO-M8010-6 和零差云控 eRob70 两个拆解案例来看,前者采用导热硅胶片,后者采用单组份导热凝胶,虽然材料形式不同,但目的都是降低 MOS 管到外壳之间的界面热阻,提升关节电机的散热效率和运行稳定性。
人形机器人、四足机器人、协作机器人这几年发展很快,关节电机也在往更小体积、更高扭矩、更高集成度的方向做。
在一个关节模组里面,电机、驱动板、MOS 管、MCU、编码器和外壳都挤在很有限的空间里。结构紧凑是好事,但散热压力也会随之上来。尤其是 MOS 管、电源芯片这类功率器件,在频繁启停、高负载运行时,很容易形成局部热点。
这类产品一般不适合依赖主动风冷,更多还是通过结构件和金属外壳把热量带出去。中间如果有空气间隙,热就传不出来。所以,导热硅胶片、单组份导热凝胶、导热泥这类热界面材料,在机器人关节电机导热方案里就变得很重要。
它们解决的不是“散热面积”的问题,而是解决热源和外壳之间“接触不好”的问题。
机器人关节电机的热管理,难点通常不在单个材料参数,而在结构本身。
比如 MOS 管面积不大,但发热集中;PCB、元器件和金属外壳之间又会有公差叠加,装起来之后不可能完全贴死。中间只要留下空气间隙,界面热阻就会明显变大。
还有一个问题是元器件高度不一致。驱动板上有 MOS 管、电容、电阻、MCU、连接器,不同器件高度差比较常见。用太硬的材料,可能压不到位;用太厚的材料,又会增加热阻,还可能给 PCB 和焊点带来应力。
再加上机器人关节本身长期运动,有振动、冲击和温度循环,导热材料不光要初始导热效果好,还要考虑长期使用后会不会变形、开裂、出油、泵出,或者贴合变差。
所以,关节电机导热材料选型,不能只看导热系数,还要看贴合性、压缩性、绝缘性、装配方式和长期可靠性。
从宇树 GO-M8010-6 关节电机的拆解案例来看,驱动 MOS 管区域使用了导热硅胶片作为热界面材料。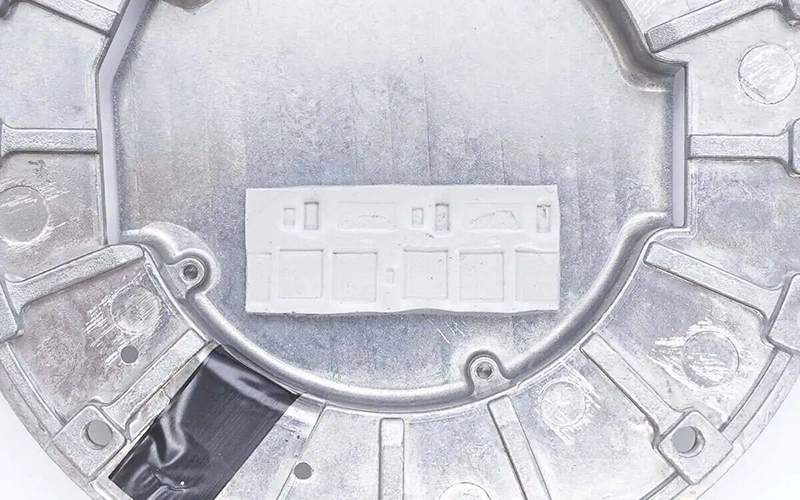
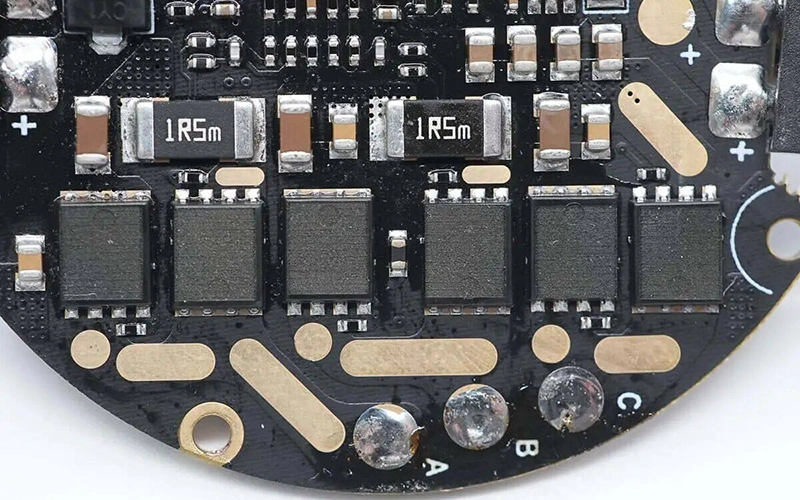
这个结构比较典型,热传导路径大致是:
MOS 管 → 导热硅胶片 → 电机金属外壳 → 外部环境
导热硅胶片适合这种相对规则的间隙。它厚度稳定,装配方便,同时具备一定压缩性,可以补偿 MOS 管和外壳之间的小间隙。对于批量生产的机器人关节电机来说,这种方案的好处是工艺比较清楚,装配一致性也比较容易控制。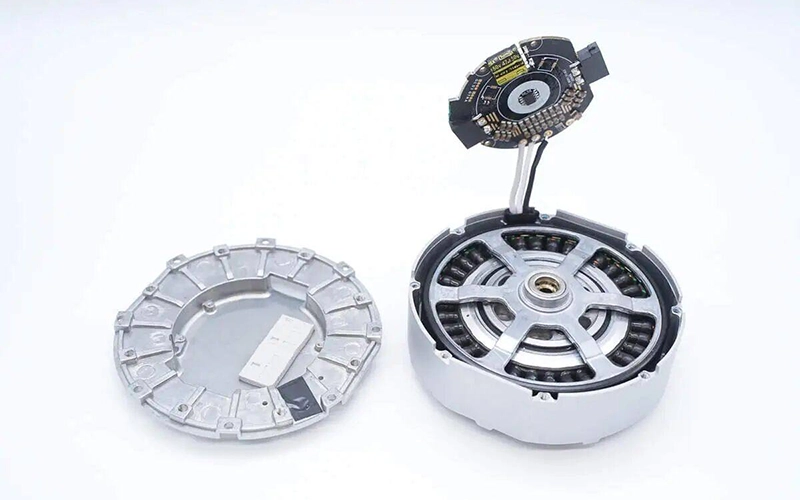
当然,导热硅胶片不是随便垫一片就可以。厚度、硬度、压缩率都要结合结构来选。材料太硬,可能贴合不好,也可能给 PCB 施加额外压力;材料太软,长期压缩以后又要考虑回弹和稳定性。
在关节电机 MOS 管散热这类应用里,比较关键的指标通常包括:
如果结构间隙比较固定、接触面比较平整,导热硅胶片是一个比较成熟的方案。
零差云控 eRob70 关节电机模块的结构也很有参考价值。
从拆解图可以看到,它的电机后盖上有两块区域做了局部铣削,形成类似散热片的结构,对应内部主要发热位置。一个区域对应 MOS 管,另一个区域对应 MCU。
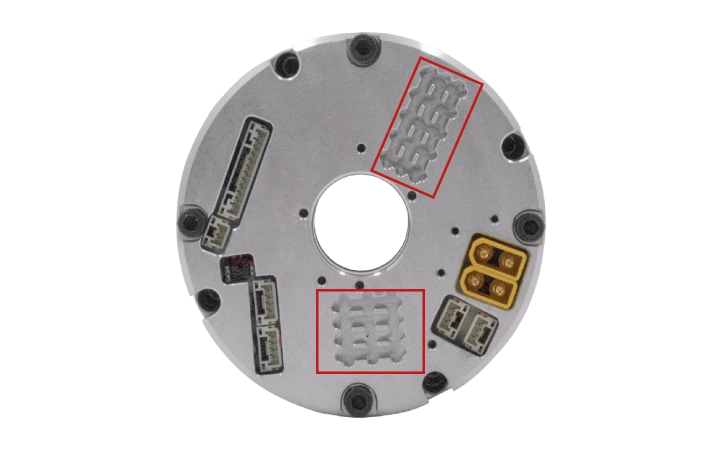
比较明显的是,MOS 管区域使用了粉色的单组份导热凝胶,也就是常说的导热泥。这个材料有较好的塑形性,能被压平,也能填到不规则缝隙里。实际看起来有点像彩泥,但它的作用是填补 MOS 管和金属后盖之间的空气间隙。
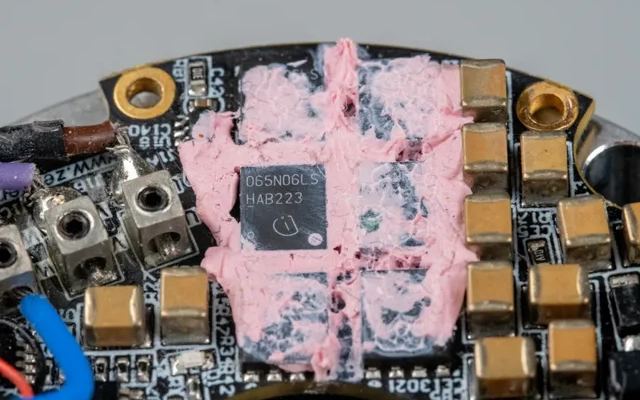
这个位置的导热路径可以理解为:
MOS 管 → 单组份导热凝胶 → 后盖内壁 → 外部散热结构 → 外部环境
这里有一个细节值得注意:外壳外侧做了散热齿片,但真正决定热能不能顺利传到外壳上的,还是内部界面接触。如果 MOS 管和外壳之间存在明显空气间隙,外部散热结构做得再精细,实际效果也会打折扣。

单组份导热凝胶适合这种器件高度有差异、间隙不完全规则的位置。它不像导热硅胶片那样需要固定形状,可以通过点胶或涂覆方式填充局部空间,装配时对 PCB 的应力也相对低一些。
还有一个很有意思的地方:MCU 区域没有看到导热凝胶。刚开始可能会以为是漏涂,但如果多个样品都是这样,那更可能是设计选择。
原因可能很简单:MCU 发热没有 MOS 管大,或者它本身接触面积、位置、温升余量都还能接受,所以没必要额外增加导热泥。这个细节反而说明,机器人关节电机导热设计不是哪里有芯片就哪里加材料,而是按发热量、间隙、接触面积和实测温升来分区处理。
在机器人关节电机 MOS 管散热应用中,导热硅胶片和单组份导热凝胶并不是绝对的替代关系,也不是谁一定更好。很多时候,两种材料都可以实现同一个目标:把 MOS 管、电源芯片等发热器件的热量传到金属外壳上。
区别主要在于结构设计、装配工艺和量产习惯不同。
如果 MOS 管到外壳之间的间隙比较规则,器件高度一致性较好,结构压缩量也能控制,导热硅胶片会是比较直接的方案。它厚度稳定,装配干净,绝缘性好,也方便返修。像宇树 GO-M8010-6 这种结构,就可以看到导热硅胶片的应用思路。
如果间隙不太规则,器件高度差更明显,或者希望材料在装配时自己填满局部空间,单组份导热凝胶会更灵活。它可以通过点胶或涂覆的方式放到指定位置,装配后被压缩铺开,减少空气间隙。零差云控 eRob70 中 MOS 管区域使用导热凝胶,就是这种思路。
所以,两个案例并不能简单理解为“一个先进、一个落后”。它们本质上都是在做同一件事:建立 MOS 管到金属外壳的低热阻通路。只是一个采用定型导热垫片,一个采用可塑形导热填缝材料。
在实际项目中,导热硅胶片和导热凝胶可以互相替代,也可以搭配使用。最终选哪一种,要看以下几个因素:
简单来说,间隙规则、希望装配简单稳定,可以选导热硅胶片;间隙复杂、希望低应力填充,可以选导热凝胶。
但这不是固定答案。真正可靠的做法,还是结合结构样机和温升测试来确认材料厚度、硬度、导热系数和最终工艺。
机器人关节电机导热材料选型,建议不要只盯着材料规格书上的导热系数。导热系数高,不代表装机温升一定低。界面贴合不好,热阻照样会很高。
更建议从下面几个方面综合判断:
有条件的话,最好结合样机实测温升来确定材料厚度和导热等级。很多时候,材料不是越高导热越好,而是要和结构、间隙、压力一起匹配。
针对智能机器人关节电机、伺服电机、无刷电机驱动板等应用,傲川科技可提供以下导热界面材料方案:
可应用于:
在项目配合上,可根据客户提供的结构图、样机间隙、发热功率和温升要求,协助进行材料选型、打样测试和量产工艺确认。
对于导热性能验证,也可根据项目需要,结合 ISO 22007-2、ASTM D5470 等测试方法,对材料导热性能、界面热阻和实际装机温升进行综合评估。
从宇树 GO-M8010-6 关节电机中导热硅胶片的应用,到零差云控 eRob70 关节电机中单组份导热凝胶的使用,可以看出一个趋势:机器人关节电机的散热设计正在变得更细。
MOS 管这种局部发热明显的位置,需要稳定的热通路;金属外壳和散热结构要发挥作用,也离不开内部导热界面材料的贴合。导热硅胶片、导热凝胶、导热泥看起来只是很小的一块材料,但在关节电机长期稳定运行里,作用并不小。
对于高集成度的机器人关节模组来说,导热材料不是简单辅料,而是热管理方案里必须认真选的一部分。